
Chasing Cerulean USBL ROV Locator Mark II - Autosync
Просто включете захранването, започнете гмуркането и проследете местоположението на ROV в реално време на дисплея на картата QGroundControl. Налични са серийна комуникация и API.
Автосинхронизацията работи чрез излагане на приемника и предавателя на GPS или ГНСС сигнали в началото на мисията и по желание на определени интервали по време на мисията. Придобиването на спътник обикновено се извършва в рамките на 30 секунди след включване на захранването. В каноничния случай на приемник ROVL, разположен в близост до оператора на ROV, и предавател ROVL на ROV, придобиването на спътник обикновено се извършва във фонов режим и по време на подготовката на ROV за стартиране и докато се извършва калибриране на IMU на приемника ROVL.
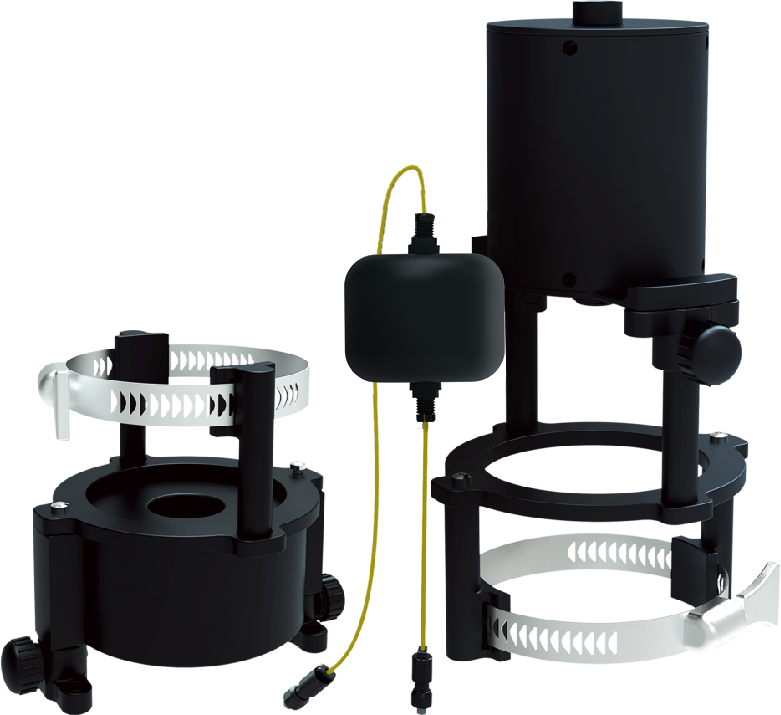
ROVL Locator Mark II включва предавател, монтиран на ROV, и приемников модул, разположен на повърхността. Пакетът се предлага и с монтажен пръстен и адаптер. Просто включете захранването, започнете гмуркането и проследявайте местоположението на ROV в реално време на дисплея на картата QGroundControl. Налични са серийна комуникация и API.
В тази система USBL са направени няколко оптимизации, насочени към конфигурацията и синхронизацията. Важно е обаче да се отбележи, че при реална употреба точността на позициониране на системата USBL може да бъде повлияна от различни фактори, като например условия на околната среда, оперативни сценарии и смущения в сигнала.
Размахът на грешката в позиционирането за хоризонтално позициониране на ROV е приблизително 0-8,5 метра, когато разстоянието между приемника и предавателя е 50 метра (това се дължи на промени в положението и ориентацията на приемника), а разстоянието на отместване се увеличава с увеличаване на разстоянието между приемника и предавателя.
За да се повиши практическата точност на системата USBL, препоръчваме да фиксирате приемника USBL, за да предотвратите неговото завъртане поради колебанията на морската вода. Освен това се препоръчва да се поддържа разумно разстояние между приемника USBL и стената на басейна или плавателния съд, за да се избегнат смущения.
Моля, актуализирайте до най-новите версии на фърмуера на APP, ROV и док.
- Отстранени са проблеми, докладвани във версия 4.9.9 на APP.
- Ново: Записване и импортиране на траектория на USBL
- Ново: USBL маркиране на интересни точки & Показване на картата/видеопредаването в разделен екран
- Ново: Автоматично съхранение на данни от сензори за качество на водата в картата с памет на ROV
- Ново: Два режима на работа на ROV
- Ново: Възможност за управление на робота с помощта на ROV: Механично рамо/метод за управление на пробовземането за качество на водата - кратко натискане на десния бутон на рамото за отваряне/затваряне, дълго натискане за управление на десния диск
- Ново: Ръчен режим на конфигуриране за док за аксесоари.